Saved Bookmarks
| 1. |
Figure shows a freeze-frame of a 0.500 kg particle moving along a straight line with a position vector given by vecr=(-2.00t^(2)-t)hati+5.00hatj, With vecr in meters and t in seconds, starting at t = 0. The position vector points from the origin to the particle. In unit-vector notation, find expressions for the angular momentum vecl of the particle and the torque vectau acting on the particle, both algebraic signs in terms of the particle's motion. |
|
Answer» Solution :(1) The point about which an ANGULAR momentum of a particle is to be calculated must always be specified. Here it is the origin. (2) The angular momentum `vecl` of a particle is given by Eq. `(vecl=vecrxxvecp=m(vecrxxvecv))`. (3) The sign associated with a particle.s angular momentum is set by the sense of ROTATION of the particle.s position vector as the particle moves: clock-wise is negative and counterclockwise is positive. (4) If the torque acting on a particle and the angular momentum of the particle are calculated around the smae point, then the torque is related to angular momentum by Eq. `(vectau=dvecl//dt)`. Calculations: In order to use Eq. to find the angular momentum about the origin, we first must find an expression for the particle.s velocity by taking a time derivative of its position vector. Following Eq. `(vecv=dvecr//dt)`, `vecv=d/dt((-2.00t^(2)-t)hati+5.00hatj)` = `(-4.00t-1.00)hati`, with `vecv` in METERS per second. Next, let.s take the cross product of `vecrandvecv` using the template for cross products displayed in Eq. `vecaxxvecb=(a_(y)b_(z)-b_(y)a_(z))hati+(a_(z)b_(x)-b_(z)a_(x))hatj+(a_(x)b_(y)-b_(x)a_(y))HATK` Here the generic `veca` is `vecr` and the generic `vecb` is `vecv`. However, because we really do not want to do more work than needed, let.s first just think about our substitutions into the generic cross product. Because `vecr` lacks any z component and because `vecv` lacks any y or z component, the only nonzero term in the generic cross product is the very last ONE `(-b_(x)a_(y))hatk`. So, let.s cut to the chase by writing `vecrxxvecv=-(-4.00t-1.00)(5.00)hatk=(20.0t+5.00)hatkm^(2)//s` Note that, as always, the cross product produces a vector that is perpendicular to the original vectors. To finish up Eq. we multiply by the mass, finding `vecl=(0.500kg)[(20.0t+5.00)hatkm^(2)//s]` = `(10.0t+2.50)hatk kg*m^(2)//s`. The torque about the origin then immediately follows from Eq. `vectau=d/dt(10.0t+2.50)hatkkg*m^(2)//s` = `10.0hatkkg*m^(2)//2^(2)=10.0hatkN*m` 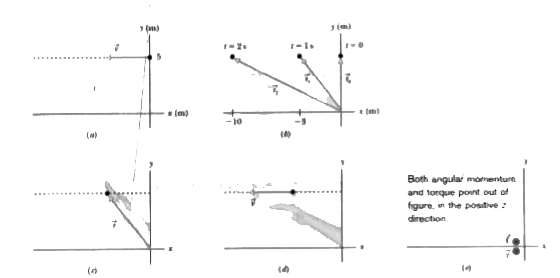
|
|